Представьте себе сеть взаимосвязанных автономных роботов, работающих вместе в скоординированном танце, чтобы ориентироваться в кромешной тьме океана при проведении научных исследований или поисково-спасательных операций.
В новом исследовании, опубликованном в Scientific Reports, команда, возглавляемая исследователями Университета Брауна, представила важные первые шаги в создании этих типов подводных навигационных роботов. В исследовании исследователи описывают конструкцию небольшой роботизированной платформы под названием Pleobot, которая может служить как инструментом, помогающим исследователям понять метод плавания, подобный крилю, так и основой для создания небольших, высокоманевренных подводных роботов.
В настоящее время Pleobot состоит из трех сочлененных секций, которые имитируют плавание, подобное крилю, называемое метахронным плаванием. При разработке Pleobot исследователи черпали вдохновение у криля, который является замечательным водным спортсменом и демонстрирует мастерство в плавании, ускорении, торможении и поворотах. В исследовании они демонстрируют возможности Pleobot имитировать ноги плавающего криля и дают новое представление о взаимодействии жидкости и структуры, необходимых для поддержания устойчивого движения криля вперед.
Согласно исследованию, Pleobot обладает потенциалом, позволяющим научному сообществу понять, как использовать преимущества 100 миллионов лет эволюции для создания более совершенных роботов для океанской навигации.
«Эксперименты с организмами сложны и непредсказуемы», — сказала Сара Оливейра Сантос, кандидат наук в инженерной школе Брауна и ведущий автор нового исследования. «Pleobot обеспечивает нам непревзойденное разрешение и контроль для изучения всех аспектов плавания криля, которые помогают ему превосходно маневрировать под водой. Нашей целью было разработать комплексный инструмент для понимания плавания, подобного плаванию криля, что означало включение всех деталей, которые делают криля такими спортивными пловцами».
Морфология и кинематические параметры плеоподия. (A) (Euphausia superba), (C) (Palaemonetes paludosus) и (E) показаны кинематические параметры свободно плавающих креветок, включенных в Pleobot, представленные в (B), (D) и (F): α определяется как угол между осью тела и проксимальный сегмент (протоподит), β — угол между протоподитом и дистальным бирамозным сегментом (образованным эндоподитом и экзоподитом экзоподита), γ появляется во время силового удара, когда экзоподит и эндоподит разделяются, и ζ характеризует купирование, образованное между экзоподитом и эндоподитом. Pleobot (G) спроектирован на основе механической зубчатой передачи для активного управления α и β при пассивном интегрировании γ. Обратите внимание, что (C) был снят со спины организма, в то время как (E) показывает плеоподий крупным планом сбоку (как на рисунке A).
Эта работа является результатом сотрудничества исследователей Брауна из лаборатории доцента инженерного факультета Моники Мартинес Вильгельмус и ученых из лаборатории Франсиско Куэнки-Хименеса в Национальном автономном университете Мексики.
Основная цель проекта — понять, как метахронные пловцы, такие как криль, умудряются функционировать в сложных морских условиях и совершать массовые вертикальные миграции на высоту более 1000 метров — что эквивалентно укладке трех Эмпайр Стейт Билдинг — дважды в день.
«У нас есть снимки механизмов, которые они используют для эффективного плавания, но у нас нет исчерпывающих данных», — сказал Нильс Тэк, научный сотрудник лаборатории Вильгельмуса. «Мы построили и запрограммировали робота, который точно имитирует основные движения ног, чтобы производить определенные движения и изменять форму придатков. Это позволяет нам изучать различные конфигурации, проводить измерения и сравнения, которые в противном случае были бы недоступны для живых животных».
Техника метахронного плавания может привести к замечательной маневренности, которую криль часто демонстрирует благодаря последовательному развертыванию своих плавательных ног волнообразным движением «спина вперед». Исследователи полагают, что в будущем развертываемые системы swarm можно будет использовать для картографирования океанов Земли, участия в миссиях по поиску и восстановлению, охватывая большие территории, или отправлять на спутники Солнечной системы, такие как Европа, для исследования их океанов.
«Скопления криля являются прекрасным примером роев в природе: они состоят из организмов с обтекаемым телом, перемещающихся на расстояние до одного километра в каждую сторону, обладающих превосходной подводной маневренностью», — сказал Вильгельмус. «Это исследование является отправной точкой нашей долгосрочной исследовательской цели — разработки следующего поколения автономных подводных зондирующих аппаратов. Способность понимать взаимодействие жидкости и структуры на уровне придатков позволит нам принимать обоснованные решения о будущих конструкциях».
Исследователи могут активно управлять двумя сегментами ног и пассивно управлять двустворчатыми плавниками Плеобота. Считается, что это первая платформа, которая воспроизводит движение открывания и закрывания этих ребер. Создание роботизированной платформы было многолетним проектом, в котором участвовала междисциплинарная команда в области гидромеханики, биологии и мехатроники.
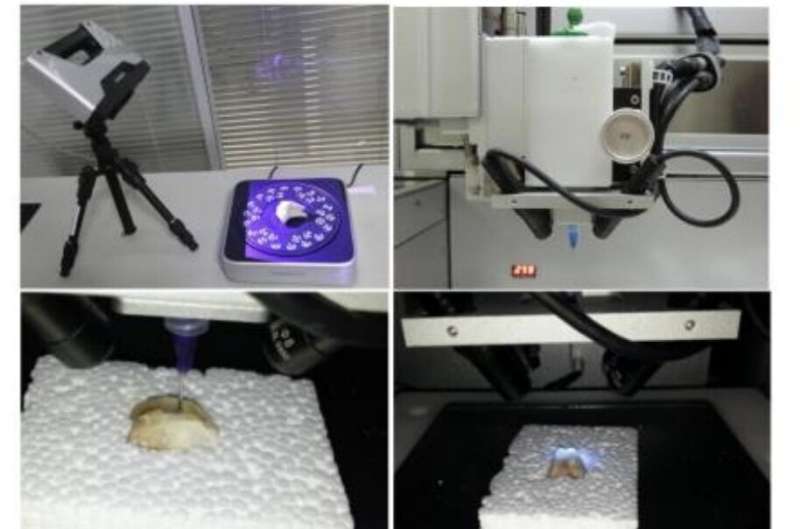
Исследователи построили свою модель в 10 раз большем масштабе, чем у криля, который обычно размером со скрепку для бумаги. Платформа в основном состоит из деталей, пригодных для 3D-печати, а дизайн доступен в открытом доступе, что позволяет другим командам использовать Pleobot для продолжения ответов на вопросы о метахронном плавании не только криля, но и других организмов, таких как омары.
В опубликованном исследовании группа раскрывает ответ на один из многих неизвестных механизмов плавания криля: как они создают подъемную силу, чтобы не тонуть, плывя вперед. Если криль не плавает постоянно, он начнет тонуть, потому что он немного тяжелее воды. Чтобы избежать этого, им все равно приходится создавать некоторую подъемную силу даже во время плавания вперед, чтобы иметь возможность оставаться на той же высоте в воде, сказал Оливейра Сантос.
«Мы смогли раскрыть этот механизм с помощью робота», — сказал Юньсин Су, научный сотрудник лаборатории. «Мы выявили важный эффект области низкого давления на задней стороне плавательных ног, которая способствует увеличению подъемной силы во время мощного гребка движущихся ног».
В ближайшие годы исследователи надеются развить этот первоначальный успех и продолжить разработку и тестирование конструкций, представленных в статье. В настоящее время команда работает над интеграцией морфологических характеристик креветок в роботизированную платформу, таких как гибкость и щетинки вокруг придатков.